Lenkung Aufbau – USB Version – sehr alt – 1. Version
30. Dezember 2019Anleitung für die neue Platine
Input ist die Stromzufuhr zum Board (mit 15 A absichern)
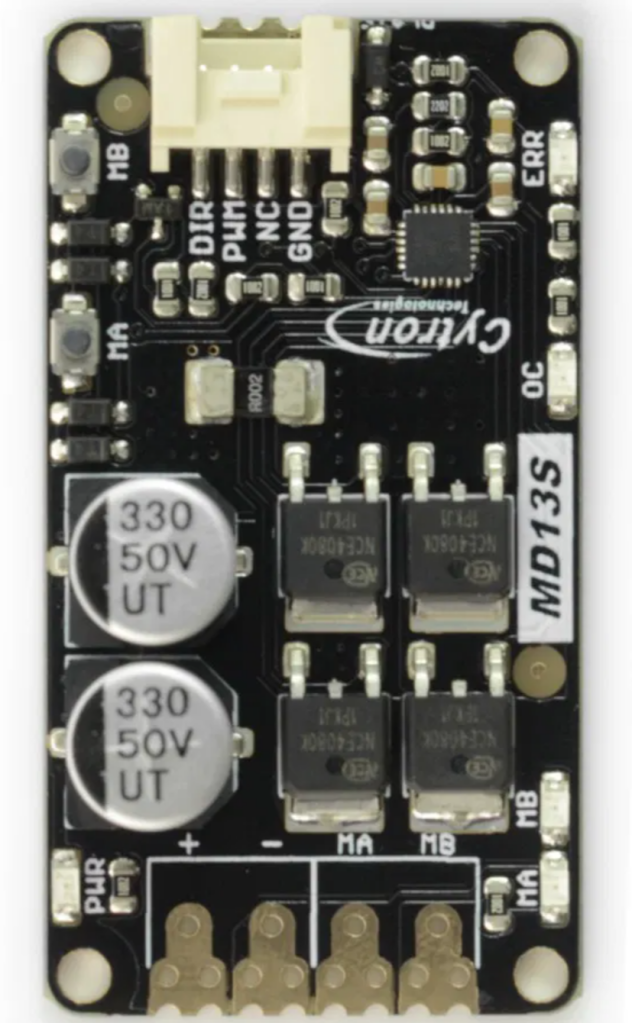
Ouput ist der Ausgang zum Motorcontroller ( ist aktiv wenn das Board eingeschaltet ist) mit +- am Motorcontroller verbinden
Kabel beim Motorcontroller auf der 2. Seite abzwicken und abisolieren
Motorcontroller anschließen
Rotes Kabel wird nicht verwendet
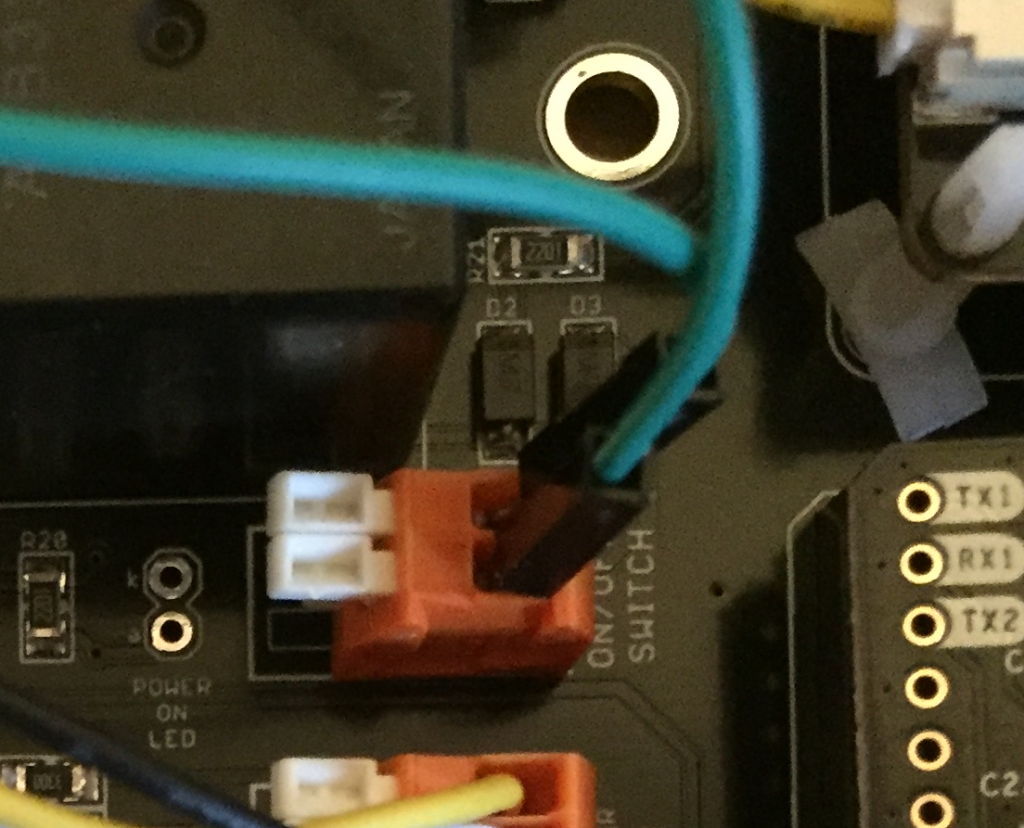
On/Off Switch verkabeln
Dient zum Einschalten der Stromversorgnung
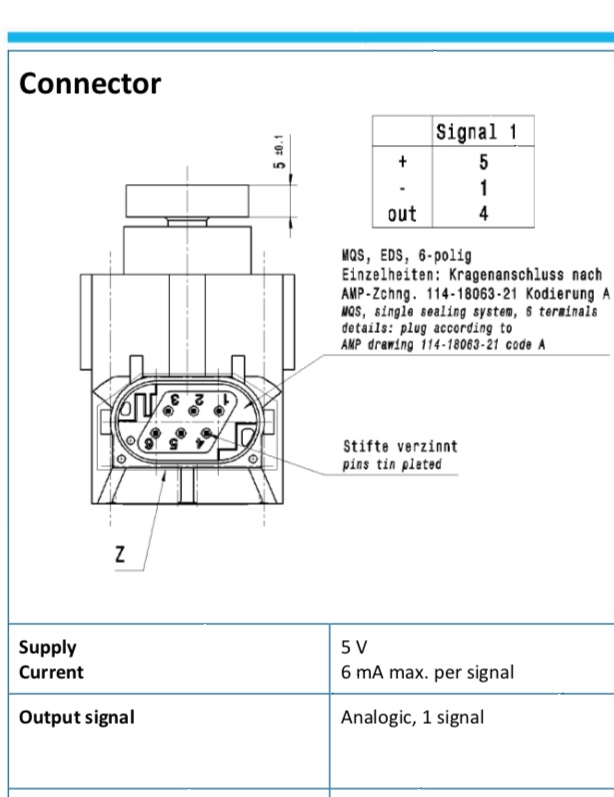
Lenkwinkelsensor verkabeln
5V Stromversorgung
GnD Masse
A0 = Signal
Ist ein Lenkwinkelsensor beim Traktor vorgerüstet und mit der Traktorelektronik verbunden muss die Masse vom Sensor auf A1 und das Signal auf A0 verkabelt werden. Die Versorgung entfällt.
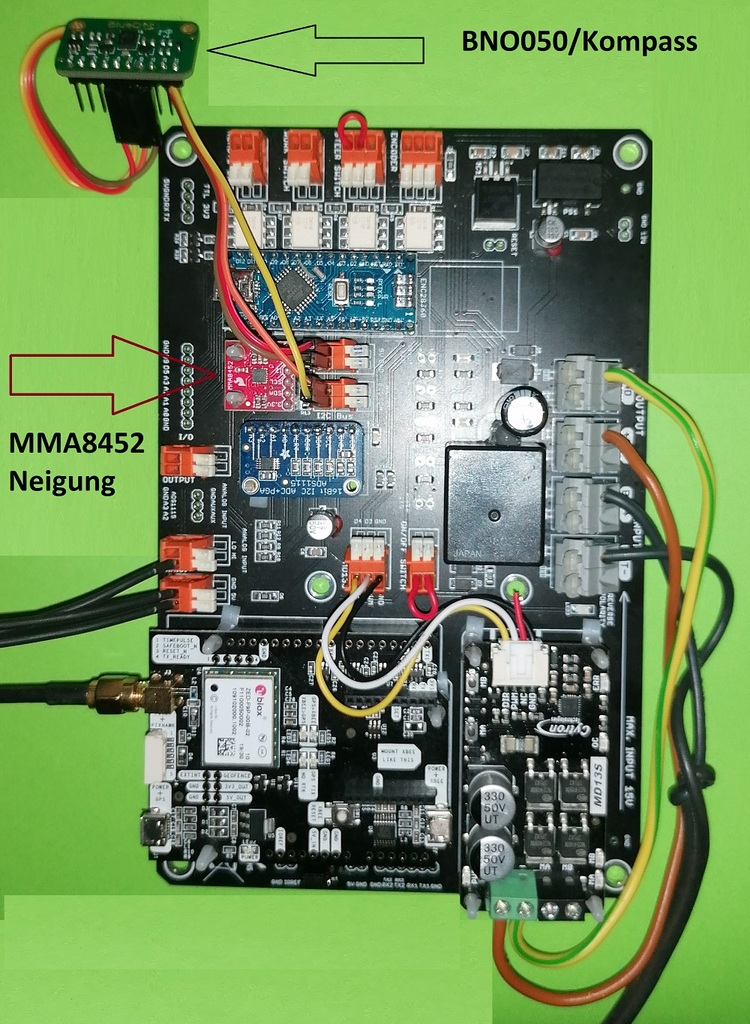
BNo05 verkabeln
SCL, SDA, GND und 5V beim Bno05 als VCC beschriftet! (Achtung beim Sensor nicht den 3.3 V Eingang verwenden)
Achtung bei neueren Versionen von AgOpenGps wird der MMA (rot) und der Bn085 (grüner Kompass) nicht mehr verwendet. Am besten mit dem CMPS14 austauschen.
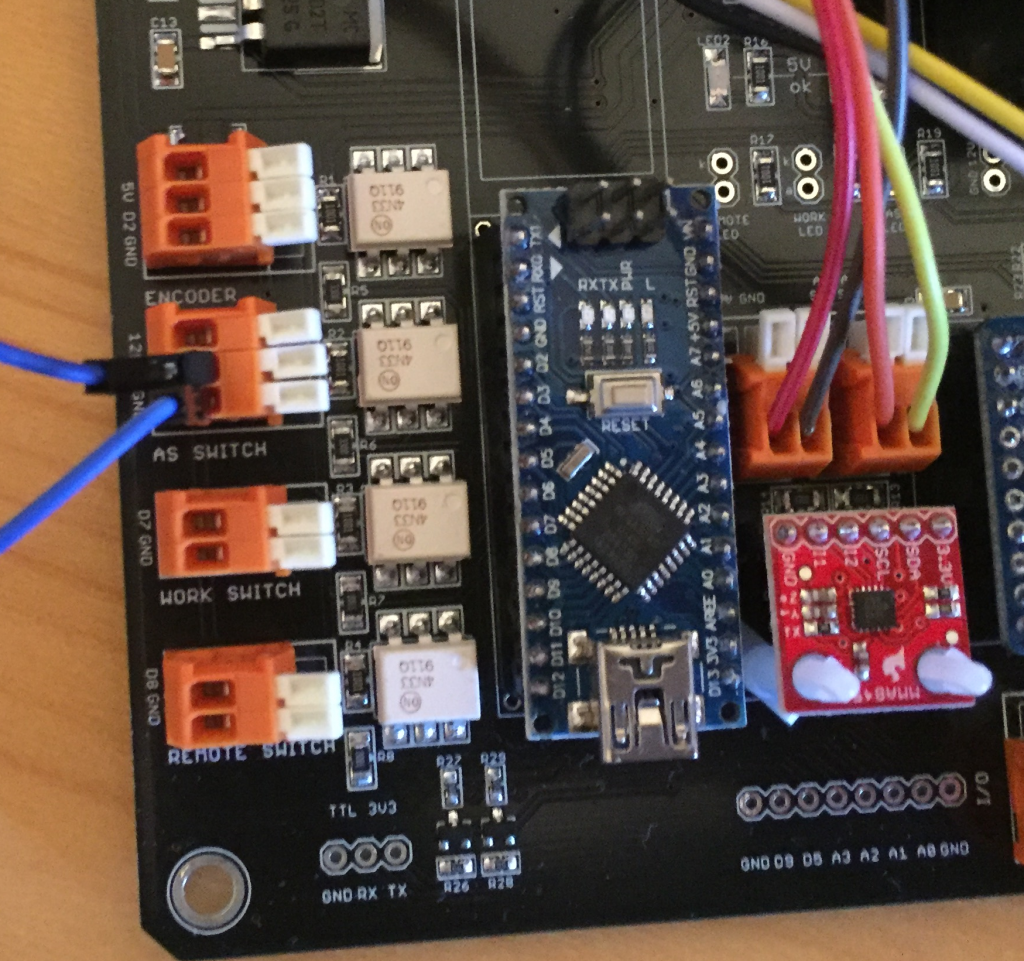
AS Switch dient zum aktiveren vom Motor (Eingang)
kann kurzgeschlossen werden.
WorkSwitch aktiviert das Markieren in AgOpen