FAQs
Arduino
A) Stromversorgung prüfen
*Wackler
*Dünne Kabel
*Spannungsschwankungen von Lichtmaschine (Wandler schlecht)
*Batteriemasse
B) Tablet Netzteil – Fehlerhaft
- Tablet vollladen – ohne Netzteil probieren
- Fehler gibt es sehr Häufig beim FZ-G1 von Panasonic
C) Zusätzliche Relais ohne Freilaufdiode
D) USB vom Tablet schlecht (wackler)
E) evt. USB Kabel von der Platine kürzen
F) keine Verlängerungskabel – Konverterkabel benutzen
G) USB – Hubs machen häufig Probleme —> Empfehlung : Aktive Hubs von Eksys
H) Manche kleine 12 V Motoren stören das System oft auch extrem
I) Zusätzlich kann man noch einen Lötpunkt löten dann hat das PCB zusätzlich Strom per USB vom Tablet
j) 35 v 1000 uf Kondensator zusätzlich verbauen (plus auf plus minus auf minus)
Verkabelung prüfen und am Signalkabel gegen GND messen ob auch Spannung zurückkommt. Maximal 5 V – sonst raucht der ADS ab.
PCB Board eingeschaltet?
In der Arduino Konfiguration den richtigen Anschluß gewählt? A0 = Direktanschluss am Arduino . Single oder Differential = ADS1115
Die Impulse pro Grad richtig eingestellt (30-50 als Richtwert bei ADS) 4-8 bei Direktanschluss.
Ist ein aktuelles Problem in den 4.1.xx Versionen.
Kann behoben werden in dem man über AgOpenGps die Arduino Konfiguration neu sendet. Wird mit der nächsten Version behoben.
Führungslinien
Generell Netzwerkkabel anstatt Wlan zur Verbindung verwenden.
Im Windows Taskmanager die Priorität von AgOpen erhöhen. Tab Details – Rechtsklick auf AgOpen.
Die Führungslinie A – B Punkt immer beim fahren anlegen.
Hat man AgOpen gestartet und einen neues Feld angelegt gibt es in der oberen Mitte des Bildschirms einen grauen Balken. Dieser Balken stellt die Neigung dar.
Einfach das PCB (oder Sensor) auf einer Seite anheben und sehen ob der Balken auch gleich reagiert.
Passiert wenig bis gar nichts ist die falsche Achse eingestellt (x – y)Bewegt sich der Balken in die falsche Richtung kann man die Auslesung auch umkehren (beides Arduino Config).
Generell würde ich die Antennenhöhe evt sogar einen halben bis einen ganzen Meter niedriger einstellen.Somit wird auch das Lenken ruhig und die Neigung hat nicht so einen großen Einfluss.
Den Neigungssensor mit Neigung Nullstellen auf einer ebenen Fläche (Brückenwaage) auf 0 stellen.
GPS
Prüfen ob man mit dem RTK – Receiver verbunden ist.
Viele Tablets / Laptops haben einen internen GPS Empfänger – damit funktioniert es nicht.
Zuerst alle RTK Empfänger AUSSTECKEN– F9P / Autosteer PCB / ByNav etc..
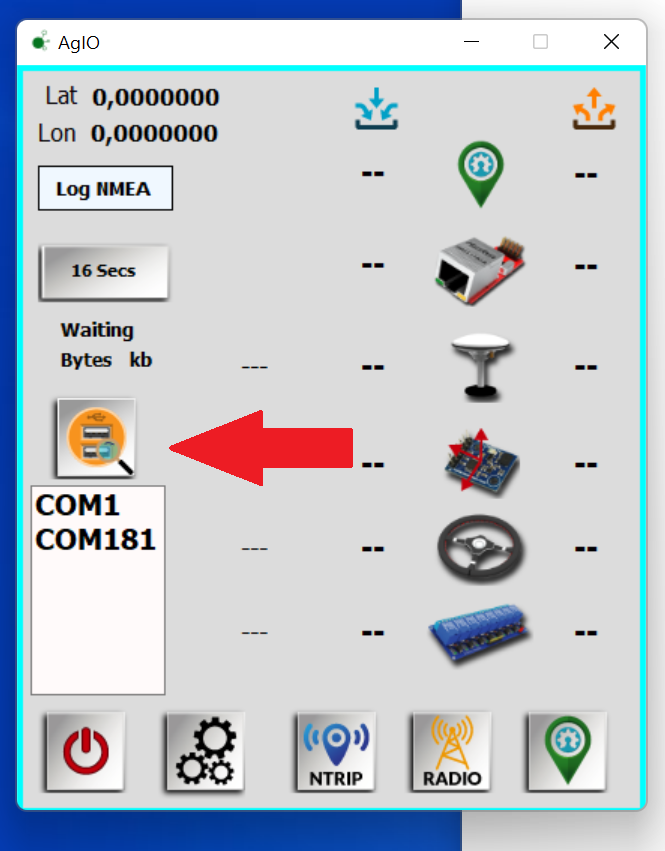
Danach in AGIO Com Ports überprüfen. Roter Pfeil
Jetzt werden alle COM Ports des Tablets angezeigt.
Jetzt den RTK – Receiver / Autosteer PCB anstecken.
Erneut Com Ports scannen.
Mit Receiver verbinden

Hat man nur einen F9P /Bynav wird jetzt ein Com Port mehr angezeigt.
Bei meinem Autosteer PCB gibt es 2 Com Ports mehr. – Dazu einfach in nachfolgenden Schritten beide probieren.
Hier ist COM59 der neue Com Port des RTK Receivers.
Danach die Verbindungen wählen.
Bei GPS den entsprechenden COM Port mit 115200 wählen und den grünen Knopf zum verbinden drücken.
Different Port then GPS nicht verwenden!!!
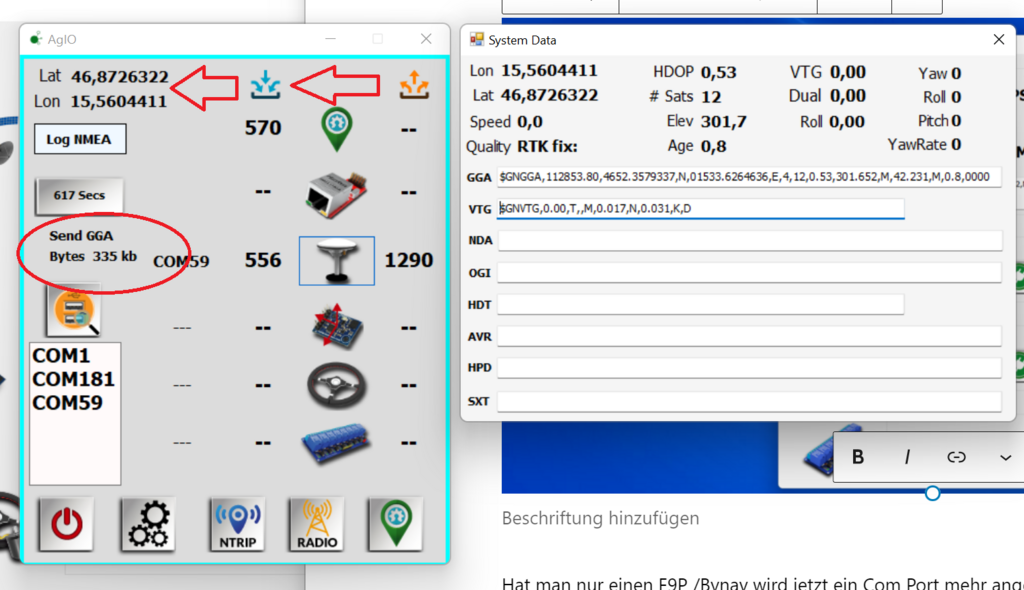
Hat man den Ntrip Client richtig konfiguriert sollten die Bytes (roter Kreis) hochzählen – ca 1 kb pro Sekunden
Bei Lat / Lon sollten Koordinaten angezeigt werden.
Klickt man auf die blauen Pfeile öffnet sich ein Fenster mit mehr Informationen.
GPS Single und eine Age Wert von 0 bedeutet keine Korrekturdaten.
RTK Fix und ein Age Wert (Alter der Korrekturdaten) unter 2 Sekunden ist perfekt.
RTK Float oder DGPS bedeutet einen schlechten Empfang der Antenne – Büro :-), Fensterbank, Garage usw…
Steigt der Age Wert immer wieder an und Zählt hoch gibt es ein Problem mit dem Internet.
NTRIP Beispieldaten für Apos Österreich (ähnlich Sapos Deutschland)
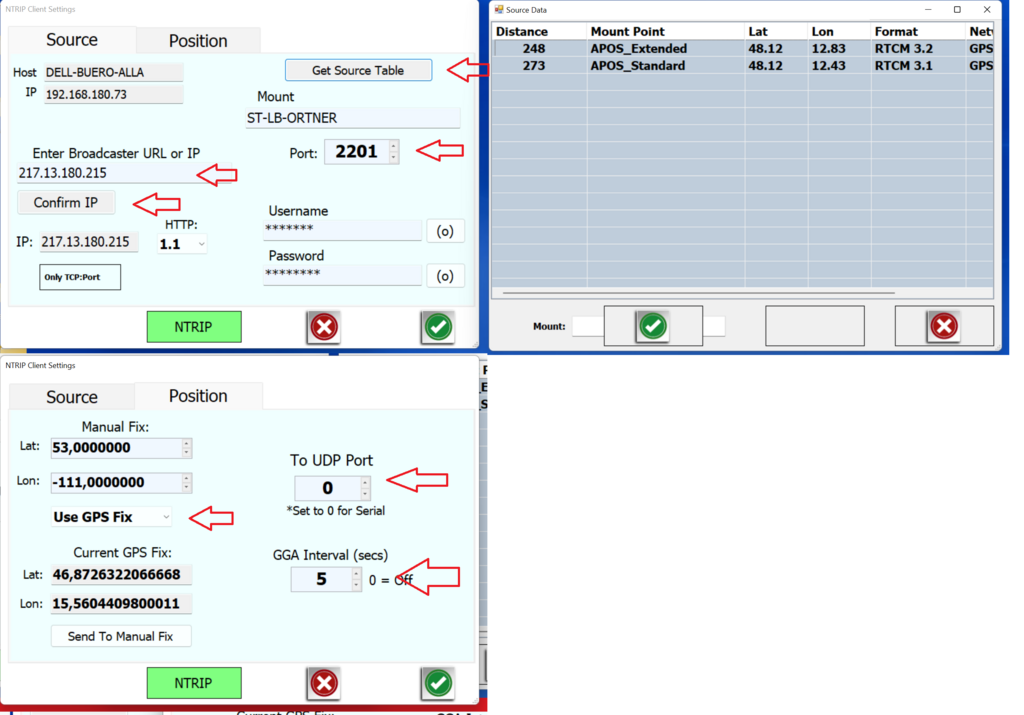
Zuerst Url oder Ip eingeben. 217.13.180.215 für Apos
Confirm IP drücken – jetzt sollte unten das gleiche angezeigt werden.
HTTP 1.1
Only TCP:Port NICHT aktiveren.
Port 2201 – für Apos wählen
Get Source Table drücken und Apos_Extended wählen
Username und Password eingeben.
Im Reiter Postion:
USE GPS fix wählen.
to UDP Port 0 lassen für den USB Port
GGA Interval 5-10 Sekunden.
NTRIP aktivieren. (Grüne Taste unten)
Erhält der Receiver Korrekturdaten und steht der Empfänger im Freien so sollte AgOpen RTK Fix oder RTK Float anzeigen. Beim F9 sollte das nach dem Einstecken maximal 2 Minuten dauern.
Was kann ich alles überprüfen?
- Basis Station überprüfen
- im Ucenter: Receiver>NtripClient aufrufen
- Adresse / Port / Username / Password eingeben
- Update SourceTable und dann MountPoint Details klicken
- Werden dort Details angezeigt ist die Basis schon mal halbwegs in Ordnung
- Entsprechenden Mountpoint auswählen und mit OK bestätigen
- Jetzt sollte der Client Daten Empfangen. Welches ganz unten mit Ntrip Client mit Connected und Grün angezeigt wird.
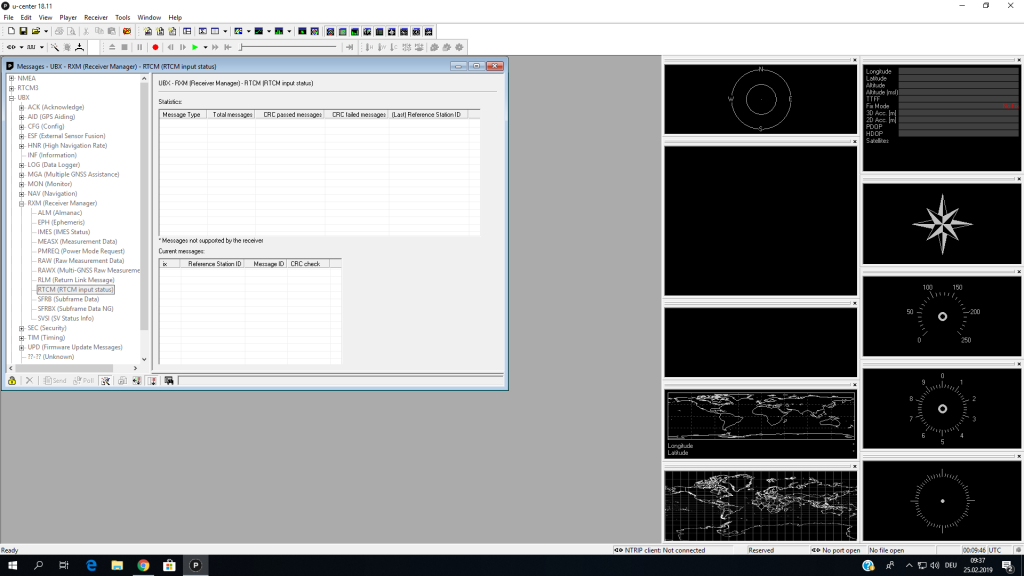
- als nächstes Kann man im Ucenter: UBX> rechte Maustaste und Enable Child Messages aktivieren
- unter UBX>RXM>RTCM sieht man dann 2 Fenster
- im Unteren sollte man den Datenstream sehen
- steht bei CRC Check ein fail dann ist evt. etwas nicht ordentlich verkabelt(Eigenbau RUT955)
- im Oberen die Übersicht der Empfangen Messages
- fehlen hier die Daten gibt es einen Fehler mit der Basis
- Bei selbst gebauten Basisstationen ist es sehr wichtig das dort alle Daten richtig konfiguriert sind.
Diese können unter View>MessageView
UBX>rechte Maustaste >enable Child Messages
wieder aktiviert werden.
Dieser Datenstrom ist jedoch relativ groß und belastet Cerea und Agopen mit Datenmüll welcher nicht gebraucht wird.
Also einfach nachher wieder abschalten!
Ist leider ein BUG in AgOpen. Wir versuchen den Fehler zu finden – erweist sich aber als sehr schwer…
Lenken
Verkabelung prüfen und am Signalkabel gegen GND messen ob auch Spannung zurückkommt. Maximal 5 V – sonst raucht der ADS ab.
PCB Board eingeschaltet?
In der Arduino Konfiguration den richtigen Anschluß gewählt? A0 = Direktanschluss am Arduino . Single oder Differential = ADS1115
Die Impulse pro Grad richtig eingestellt (30-50 als Richtwert bei ADS) 4-8 bei Direktanschluss.
Netzwerk
Generell Netzwerkkabel anstatt Wlan zur Verbindung verwenden.
Im Windows Taskmanager die Priorität von AgOpen erhöhen. Tab Details – Rechtsklick auf AgOpen.