
Beschreibung
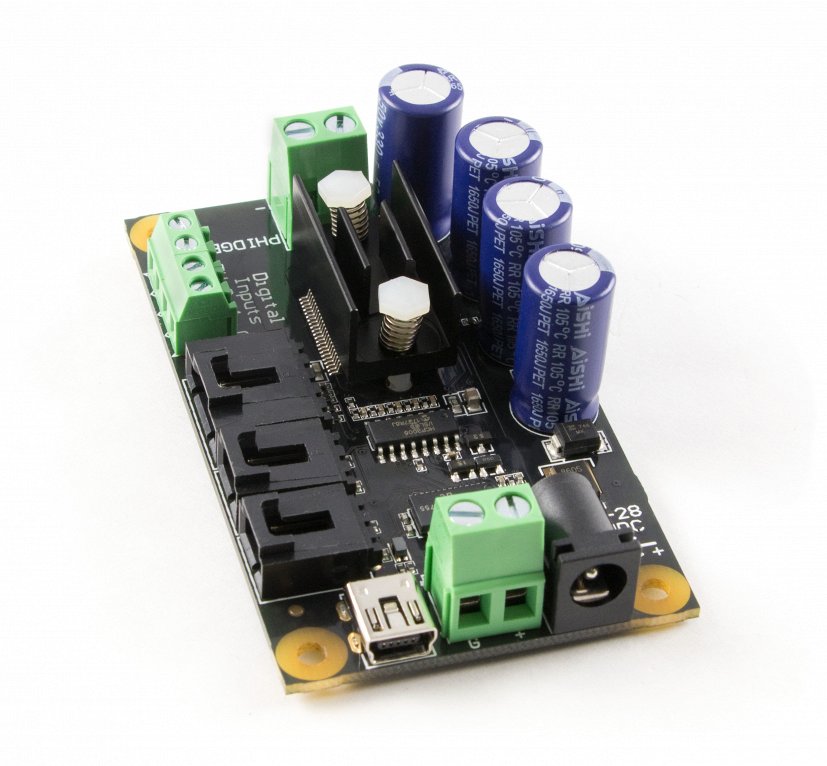
Diese Version des 1065 verfügt über einen eingebauten Kühlkörper für den Treiberchip, um eine Überhitzung zu vermeiden.
Mit dem 1065 können Sie die Richtung, Geschwindigkeit und Beschleunigung eines Gleichstrommotors steuern. Der Motor wird von einer externen Stromversorgung (9 bis 28 VDC) gespeist.
Gebürstete Gleichstrommotoren sind sehr einfach zu verstehen, aber sehr schwer genau zu steuern. Durch Anlegen einer Spannung oder schnelles Pulsieren einer Spannung an den Klemmen des Motors fließt Strom durch den Motor und er beginnt sich zu drehen. Je nach Stromrichtung dreht sich der Motor im oder gegen den Uhrzeigersinn. Der 1065 ändert die effektive Spannung durch Ändern des Prozentsatzes der Zeit, in der die volle Versorgungsspannung an den Motor angelegt wird. Durch sehr schnelles Umschalten der Spannung (eine als PWM bezeichnete Technik) wird die Steuerung kleiner, effizienter und billiger.
Eine grobe Steuerung der tatsächlichen Motordrehzahl kann in der Software automatisch mithilfe der Eigenschaft Gegen-EMK oder der Stromerfassung erreicht werden.
Eine genaue Steuerung von Gleichstrommotoren kann durch Verwendung von Encodern erreicht werden. Sie können Regelkreise über Software implementieren, indem Sie die Daten verwenden, die von den integrierten digitalen Eingängen, analogen Eingängen und Encodereingängen bereitgestellt werden. Es gibt ein Ereignis, das alle 16 ms ausgelöst wird und den Gegen-EMK-Wert für den angeschlossenen Motor zurückgibt, was für die PID-Regelung sehr nützlich sein kann. Weitere Informationen finden Sie in der API im Benutzerhandbuch .
Der 1065 bietet außerdem Überstrom-, Überspannungs- und Übertemperaturschutz, um sicherzustellen, dass die Platine und der Motor nicht beschädigt werden.